Uporabniški priročnik za krmilnik koračnih motorjev TRINAMIC TMCM-1180

TRINAMIC Motion Control GmbH & Co. KG Hamburg, Nemčija www.trinamic.com
Preneseno iz Arrow.com.
1 Lastnosti
PD86-1180 je popolna mehatronska rešitev z najsodobnejšim naborom funkcij. Je zelo integriran in ponuja priročno rokovanje. PD86-1180 je sestavljen iz koračnega motorja NEMA 34 (velikost prirobnice 86 mm), elektronike krmilnika/gonilnika in integriranega kodirnika. TMCM-1180 je inteligentni krmilnik/gonilni modul koračnega motorja, ki vsebuje novo izjemno tehnologijo coolStepTM za krmiljenje toka brez senzorja, odvisno od obremenitve. To omogoča energetsko učinkovito delovanje motorja. Z napredno funkcijo stallGuard2TM je mogoče zaznati obremenitev motorja z visoko ločljivostjo. Modul je zasnovan za neposredno montažo na koračni motor QMot s prirobnico 86 mm.
GLAVNE ZNAČILNOSTI
Električni podatki
– Dobava voltage: +24 V DC ali +48 V DC nominalno
– Tok motorja: do 5.5 A RMS (programabilno)
PANdrive motor
– Dvofazni bipolarni koračni motor z do 5.5 A RMS nom. tok tuljave
– Zadrževalni moment: 7Nm
Kodirnik
– Integriran magnetni dajalnik sensOstep (največ 256 korakov na rotacijo), npr. za zaznavanje izgube koraka v vseh delovnih pogojih in pozicioniranju
Integriran krmilnik gibanja
– Motion profile izračun v realnem času (krmilnik gibanja TMC428/429)
– sprotno spreminjanje parametrov motorja (npr. položaj, hitrost, pospešek)
– Visokozmogljiv mikrokrmilnik za nadzor celotnega sistema in upravljanje serijskega komunikacijskega protokola
Gonilnik bipolarnega koračnega motorja
– Do 256 mikrokorakov na polni korak
– Visoko učinkovito delovanje, nizka disipacija moči
– Dinamični nadzor toka
– Integrirana zaščita
– funkcija stallGuard2 za zaznavanje zastojev
– funkcija coolStep za zmanjšano porabo energije in odvajanje toplote
Vmesniki
– vhodi za stop stikala (levo in desno) in stikalo domov
– vložki za splošne namene in 2 izhoda za splošne namene
– USB, RS232, RS485 in CAN (2.0B do 1Mbit/s) komunikacijski vmesniki
Varnostne funkcije
– Vhod za zaustavitev. Gonilnik bo v strojni opremi onemogočen, dokler bo ta nožica odprta ali v kratkem stiku z maso
– Ločena dobava voltage vhodi za gonilnik in digitalno logiko – napajanje gonilnika voltagMed napajanjem digitalne logike se lahko izklopi zunaj, zato digitalna logika ostane aktivna
Programska oprema
– Na voljo s TMCL™ ali CANopen
– Samostojno delovanje TMCL ali daljinsko vodeno delovanje
– Programski pomnilnik (obstojen) za do 2048 ukazov TMCL
– Programska oprema za razvoj aplikacij za osebni računalnik TMCL-IDE je na voljo brezplačno
– CANopen: CiA 301 + CiA 402 (način navajanja, profile način položaja in način hitrosti).
Za dodatne informacije glejte ločena priročnika za strojno programsko opremo TMCL in CANopen
2 Kode za naročila
Kabli niso priloženi. Po potrebi svojemu naročilu dodajte ustrezen kabelski snop.

3 Mehanski in električni vmesnik
3.1 Mere in pritrdilne luknje TMCM-1180
Dimenzije plošče krmilnika/gonilnika (TMCM-1180) so pribl. 86 mm x 86 mm, da se prilega hrbtni strani 86 mm koračnega motorja. TMCM-1180 je visok 21.5 mm brez ustreznih priključkov. Za vijake M4 so štiri pritrdilne luknje.

3.2 Mere in specifikacije motorja PD86-1180
PD86-1180 vključuje elektronski modul krmilnika/gonilnika koračnega motorja TMCM-1180, magnetni kodirnik, ki temelji na tehnologiji sensOstep, in bipolarni hibridni koračni motor velikosti prirobnice 86 mm.
3.2.1 Mere PD86-3-1180

3.2.2 Specifikacije motorja QSH8618-96-55-700

3.2.3 Slika navora QSH8618-96-55-700
Podatek o navoru podrobno opisuje karakteristike navora motorja za delovanje v polnem koraku, da omogoči preprosto primerjavo. Za polnostopenjsko delovanje vedno obstaja več resonančnih točk (z manjšim navorom), ki niso prikazane. Ti bodo minimalizirani z mikrokoračnim delovanjem.

3.3 Konektorji TMCM-1180
Plošča krmilnika/gonilnika PD86-1180 ponuja osem konektorjev, vključno s konektorjem za motor, ki se interno uporablja za pritrditev tuljav motorja na elektroniko. Poleg napajalnega konektorja sta še dva konektorja za serijsko komunikacijo (eden za mini-USB in en za RS232/RS485/CAN) ter dva konektorja za dodatne vhodne in izhodne signale. Nadalje je en priključek za korak/smer in drugi za kodirnik. Izhodni konektor ponuja dva izhoda za splošno uporabo, en napajalnik voltage izhod in en vhod za zaustavitev strojne opreme. Če pustite izklopni vhod odprt ali ga povežete z zemljo, boste onemogočili gonilnik motorjatage v strojni opremi. Za delovanje mora biti ta vhod povezan z napajalno voltage. Vhodni priključek ponuja dva vhoda za stop stikala (levo in desno), en vhod za domače stikalo, dva vhoda za splošno uporabo in eno povezavo s sistemom ali signalno ozemljitvijo.



3.3.1 Napajalni priključek
Ta modul ponuja ločene vhode za napajanje za digitalno logiko (pin 2) in gonilnik/napajanjetage (zatič 1). Oba napajalna vhoda uporabljata skupne ozemljitvene povezave (pin 3 in 4). Na ta način je oskrba z električno energijo za voznika stage se lahko izklopi, medtem ko se še vedno ohranjajo informacije o položaju in statusu, ko ostane digitalno logično napajanje aktivno.
SAMO NAPAJANJE +UDRIVER V primeru, da je napajanje zagotovljeno samo za napajalni del, bo notranja dioda razdelila moč tudi na logični del. Torej, kadar ločeni napajalniki niso potrebni, je mogoče za napajanje modula uporabiti le pina 1 in 4.

Da bi zagotovili zanesljivo delovanje enote, mora imeti napajalnik zadosten izhodni kondenzator, napajalni kabli pa nizek upor, tako da delovanje sekalnika ne povzroči povečanega valovanja napajanja neposredno na enoti. Valovanje napajalne napetosti zaradi delovanja sekalnika mora biti največ nekaj 100 mV.
NAMIGI ZA NAPAJANJE
– napajalni kabli naj bodo čim krajši
– uporabite velike premere za napajalne kable

3.3.2 Serijski komunikacijski priključek
Za serijsko komunikacijo se uporablja 2-polni konektor z razmikom 8 mm. S tem konektorjem modul podpira komunikacijo RS232, RS485 in CAN.

3.3.3 USB priključek
Na plošči je na voljo 5-polni priključek mini-USB (morda je odvisno od možnosti sestavljanja).

3.3.4 Izhodni priključek
2-polni konektor z razmikom 4 mm se uporablja za povezavo dveh splošnih izhodov in gonilnikovtage vhodni pin za zaustavitev strojne opreme na enoti.
Da omogočimo vozniku motorja stage povežite /Shutdown (pin 2) na +ULogic (pin 1)!


3.3.5 Vhodni priključek
2-polni konektor z razmikom 6 mm se uporablja za povezavo vhodov za splošne namene, stikal za dom in stop na enoto.
Ohišje soparnega konektorja: PHR-6 Kontakti soparnega konektorja: SPH-002T-P0.5S

3.2.5.1 Levo in desno končno stikalo
TMCM-1180 je mogoče konfigurirati tako, da ima motor levo in desno končno stikalo (slika 4.9).
Motor se ustavi, ko potovalni mehanizem doseže eno od končnih stikal.

3.2.5.2 Konfiguracija trojnega stikala
Možno je programirati tolerančno območje okoli položaja referenčnega stikala. To je uporabno za konfiguracijo s tremi stikali, kot je prikazano na sliki 4.10. V tej konfiguraciji sta dve stikali uporabljeni kot stikali za samodejno zaustavitev, eno dodatno stikalo pa se uporablja kot referenčno stikalo med levim in desnim stikalom za zaustavitev. Levo stikalo za zaustavitev in referenčno stikalo sta povezana skupaj. Sredinsko stikalo (potovalno stikalo) omogoča spremljanje osi za zaznavanje izgube koraka.

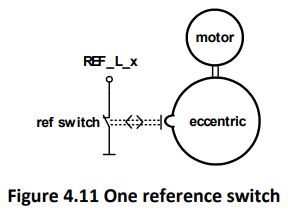
3.2.5.3 Eno končno stikalo za krožne sisteme
Če se uporablja krožni sistem (slika 4.11), je potrebno le eno referenčno stikalo, ker v takem sistemu ni končnih točk.
3.3.6 Konektor korak/smer
Za povezavo vmesnika Step/Dir se uporablja 2-polni konektor z razmikom 4 mm.

3.3.7 Konektor kodirnika
Za priključitev kodirnika se uporablja 2-polni konektor z razmikom 5 mm.
Ohišje soparnega konektorja: PHR-5 Kontakti soparnega konektorja: SPH-002T-P0.5S

3.3.8 Konektor motorja in specifikacije
Za priključitev motorja se uporablja 3.96-polni konektor s premerom 4 mm. Obe navitji tuljave motorja (bipolarni koračni motor) sta priključeni na ta priključek.
Ohišje uparjalnega konektorja: VHR-4N Uleznitveni kontakti konektorja: BVH-21T-P1.1

4 Skakalci
Večina nastavitev plošče se opravi s programsko opremo. Kljub temu je nekaj mostičkov na voljo za konfiguracijo.

4.1 Zaključek vodila RS485
Plošča vključuje 120 ohmski upor za pravilen zaključek vodila vmesnika RS485. Ko je ta mostiček sklenjen, bo upor nameščen med dve diferencialni vodi RS485+ in RS485-.
4.2 Zaključek vodila CAN
Plošča vključuje upor 120 ohmov za pravilen zaključek vodila vmesnika CAN. Ko je ta mostiček sklenjen, bo upor nameščen med dve diferencialni vodi CAN_H in CAN_L.
5 Operativne ocene
Spodaj prikazane operativne ocene je treba uporabiti kot projektne vrednosti. Med delovanjem v nobenem primeru ne smete preseči najvišjih vrednosti.

*) Elektronika gonilnika krmilnika je bila preizkušena v klimatski komori, ki deluje pri polnem toku (5.5 A RMS) 30 minut brez konvekcije zraka pri okoljski temperaturi 50 °C.
Motor se lahko segreje precej nad 50 °C, ko deluje s polnim tokom brez ustreznega hlajenja. To lahko bistveno poveča temperaturo okolja za elektroniko. Pri uporabi načina delovanja coolStep je lahko dejanski tok bistveno manjši od programiranega maks. proizvodnja toka in temperatura.
6 Funkcionalni opis
Na sliki 7.1 so prikazani glavni deli PD86-1180. PANdrive je v glavnem sestavljen iz µC (povezan s pomnilnikom EEPROM TMCL), krmilnika gibanja TMC428/429, napajalnega gonilnika TMC262A-PC z energetsko učinkovito funkcijo coolStep, zunanjega gonilnika MOSFET stage, koračni motor QSH8618 in integrirani kodirnik sensOstep. Alternativno je mogoče priključiti zunanji kodirnik. Nominalna dobava voltagso 24VDC ali 48VDC.

6.1 Arhitektura sistema
TMCM-1180 integrira mikrokrmilnik z operacijskim sistemom TMCL (Trinamic Motion Control Language). Naloge nadzora gibanja v realnem času izvaja TMC428/429.
6.1.1 mikrokrmilnik
Na tem modulu se Atmel AT91SAM7X256 uporablja za zagon operacijskega sistema TMCL in za nadzor TMC428/429. CPU ima 256 KB bliskovnega pomnilnika in 64 KB RAM-a. Mikrokrmilnik poganja operacijski sistem TMCL (Trinamic Motion Control Language), ki omogoča izvajanje ukazov TMCL, ki so poslani modulu iz gostitelja preko vmesnika RS232, RS485, USB ali CAN. Mikrokrmilnik interpretira ukaze TMCL in krmili TMC428/429, ki izvaja ukaze gibanja. Poleg tega je povezan z vmesnikom kodirnika in obdeluje vhode. Flash ROM mikrokrmilnika vsebuje operacijski sistem TMCL. Posodabljanje operacijskega sistema TMCL je možno preko vmesnika RS232 ali prek vmesnika CAN. Za to uporabite TMCL-IDE.
6.1.2 EEPROM
Za shranjevanje programov TMCL za samostojno delovanje je modul TMCM-1180 opremljen s 16kByte EEPROM, priključenim na mikrokrmilnik. EEPROM lahko shrani programe TMCL, sestavljene iz do 2048 ukazov TMCL. EEPROM se uporablja tudi za shranjevanje konfiguracijskih podatkov.
6.1.3 Krmilnik gibanja
TMC428/429 je visokozmogljiv IC za krmiljenje koračnih motorjev in lahko krmili do tri 2-fazne koračne motorje. Parametre gibanja, kot sta hitrost ali pospešek, mikrokrmilnik pošlje v TMC428/429 prek SPI. Izračun ramps in hitrost profilese izvajajo interno s strojno opremo na podlagi parametrov ciljnega gibanja.
6.1.4 Gonilnik koračnega motorja
TMC262A-PC je energijsko učinkovit visokotokovni in natančen mikrokoračni gonilnik IC za bipolarne koračne motorje. Ta gonilnik na modulu TMCM-1180 je posebna različica napajalnega gonilnika TMC262 za pogone PANdrives z motorji QSH8618.
Njegov edinstven stallGuard2 za zaznavanje obremenitve brez senzorja visoke ločljivosti se uporablja za posebno integrirano funkcijo nadzora toka, odvisno od obremenitve, imenovano coolStep. Zaradi sposobnosti odčitavanja obremenitve in zaznavanja preobremenitve je TMC262 optimalna izbira za pogone, kjer je zaželena visoka zanesljivost. TMC262 je mogoče poganjati s signali korakov/smeri kot tudi s serijskim SPITM.

Regulator toka coolStep omogoča nadzor voznikove reakcije na povečanje ali zmanjšanje obremenitve. Notranji regulator uporablja dva praga za določitev najmanjšega in največjega kota obremenitve za optimalno delovanje motorja. Trenutno hitrost povečanja in trenutno hitrost zmanjšanja je mogoče prilagoditi aplikaciji. Poleg tega je mogoče nastaviti spodnjo tokovno mejo glede na zgornjo tokovno mejo, določeno s trenutnim parametrom lestvice CS.
6.1.5 kodirnik sensOstep
Dajalnik sensOstep, uporabljen v tej enoti, temelji na sistemu magnetnega kotnega dajalnika položaja z nizko ločljivostjo. Sestavljen je iz majhnega magneta, nameščenega na zadnji strani osi koračnega motorja, in IC Hallovega senzorja z integrirano digitalno obdelavo signala (npr. za samodejno krmiljenje ojačanja, temperaturno kompenzacijo itd.), nameščenega nad magnetom na zadnji strani motorja. montirano tiskano vezje. Kodirnik ponuja ločljivosti 8 bitov (256 korakov) na vrtljaj, kar povsem zadostuje za zaznavanje izgub korakov s standardnimi 1.8° koračnimi motorji.
7 Opis delovanja TMCM-1180
7.1 Izračun: hitrost in pospešek v primerjavi s frekvenco mikrostopa in polnega koraka
Vrednosti parametrov, poslanih v TMC428/429, kot hitrost nimajo tipičnih vrednosti motorja, kot so vrtljaji na sekundo. Toda te vrednosti je mogoče izračunati iz parametrov TMC428/429, kot je prikazano v tem razdelku.


8 TMCL
TMCL, jezik TRINAMIC Motion Control, je opisan v ločeni dokumentaciji, ki se nanaša na posebne izdelke (npr. TMCM-1180 TMCL Firmware Manual). Priročniki so na voljo na www.trinamic.com. Za posodobljene podatkovne liste in opombe o uporabi glejte te vire.
9 CANopen
Modul TMCM-1180 naj bi se v prihodnjih različicah uporabljal tudi s protokolom CANopen. V ta namen je v razvoju posebna programska oprema CANopen. Prosimo, kontaktirajte TRINAMIC, če vas zanima ta možnost.
10 Politika življenjskega vzdrževanja
TRINAMIC Motion Control GmbH & Co. KG ne dovoljuje ali jamči za uporabo katerega koli od svojih izdelkov v sistemih za vzdrževanje življenja brez posebnega pisnega soglasja TRINAMIC Motion Control GmbH & Co. KG.
Sistemi za vzdrževanje življenja so oprema, ki je namenjena podpiranju ali ohranjanju življenja in katerih nedelovanje, če se pravilno uporablja v skladu z navedenimi navodili, lahko razumno pričakuje, da bo povzročilo telesne poškodbe ali smrt.
© TRINAMIC Motion Control GmbH & Co. KG 2013 Podatki v tem podatkovnem listu so točni in zanesljivi. Vendar pa ne prevzema odgovornosti za posledice njegove uporabe niti za morebitne kršitve patentov ali drugih pravic tretjih oseb, ki bi lahko nastale zaradi njegove uporabe. Specifikacije se lahko spremenijo brez predhodnega obvestila. Vse uporabljene blagovne znamke so last njihovih lastnikov.

11 Zgodovina revizij
11.1 Revizija strojne opreme

11.2 Revizija strojne opreme

12 Reference
[TMCM-1180 / PD86-1180 TMCL] Priročnik za vdelano programsko opremo TMCM-1180 in PD86-1180 TMCL[TMCL-IDE] Uporabniški priročnik za TMCL-IDE
[QSH8618] Priročnik QSH8618
Prosimo, glejte www.trinamic.com.
Dokumenti / Viri
 |
Krmilnik koračnih motorjev TRINAMIC TMCM-1180 [pdf] Uporabniški priročnik TMCM-1180 krmilnik koračnega motorja, TMCM-1180, krmilnik koračnega motorja, krmilnik motorja, krmilnik |