STMicroelectronics VL53L5CX Multizone senzor za določanje razdalje časa leta

Uvod
Namen tega uporabniškega priročnika je razložiti, kako ravnati s senzorjem časa leta VL53L5CX (ToF) z uporabo API-ja ultra lite gonilnika (ULD). Opisuje glavne funkcije za programiranje naprave, kalibracije in izhodne rezultate.
VL53L5CX je najsodobnejši senzor ToF z več območji, ki izboljšuje družino izdelkov STMicroelectronics Flight Sense. V miniaturnem ohišju, ki ga je mogoče ponovno preliti, združuje niz SPAD, fizične infrardeče filtre in difrakcijske optične elemente (DOE) za doseganje najboljšega dosega v različnih svetlobnih pogojih okolja z vrsto materialov pokrovnega stekla.
Večconske meritve razdalje so možne do 8×8 con s širokim 63° diagonalnim poljem view (FoV), ki je lahko
zmanjšano s programsko opremo. Vsako območje VL53L5CX meri razdaljo tarče do 4 metre, pri največji frekvenci 60 Hz.
Zahvaljujoč patentiranim algoritmom histogramov STMicroelectronics lahko VL53L5CX zazna različne predmete znotraj vidnega polja.
Histogram zagotavlja tudi odpornost na preslušavanje stekla nad 60 cm.

Reference
Podatkovni list VL53L5CX (DS13754).
Kratice in okrajšave
| Akronim/okrajšava | Opredelitev |
| DOE | difrakcijski optični element |
| FoV | področje view |
| I²C | interintegrirano vezje (serijsko vodilo) |
| Kcps/SPAD | Kilo-štetje na sekundo na spad (enota, ki se uporablja za količinsko opredelitev števila fotonov v nizu SPAD) |
| RAM | pomnilnik z naključnim dostopom |
| SCL | linija serijske ure |
| SDA | serijski podatki |
| SPAD | enofotonska lavinska dioda |
| ToF | Čas letenja |
| ULD | ultra lahek gonilnik |
| VCSEL | površinsko oddajajočo diodo z navpično votlino |
| VHV | zelo visoka voltage |
| Xtalk | preslušavanje |
Funkcionalni opis
Konec sistemaview
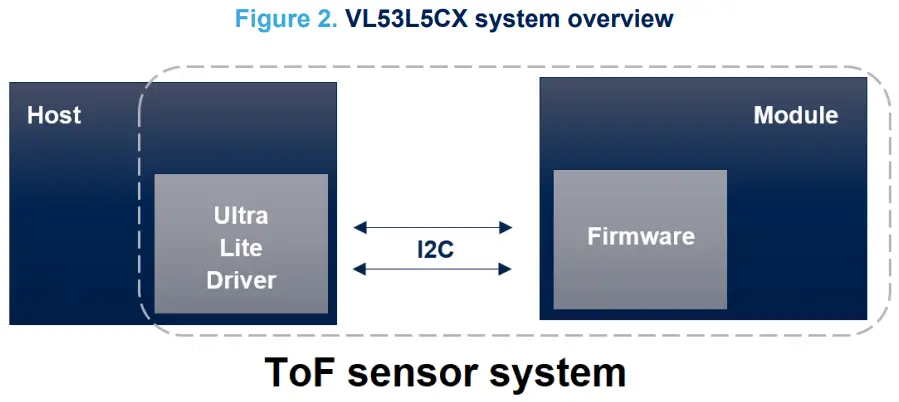
Sistem VL53L5CX je sestavljen iz modula strojne opreme in programske opreme ultra lite gonilnika (VL53L5CX ULD), ki deluje na gostitelju (glejte spodnjo sliko). Modul strojne opreme vsebuje senzor ToF. STMicroelectronics zagotavlja programski gonilnik, ki je v tem dokumentu imenovan »gonilnik«. Ta dokument opisuje funkcije gonilnika, ki so dostopne gostitelju. Te funkcije nadzorujejo senzor in pridobivajo podatke o razponu.
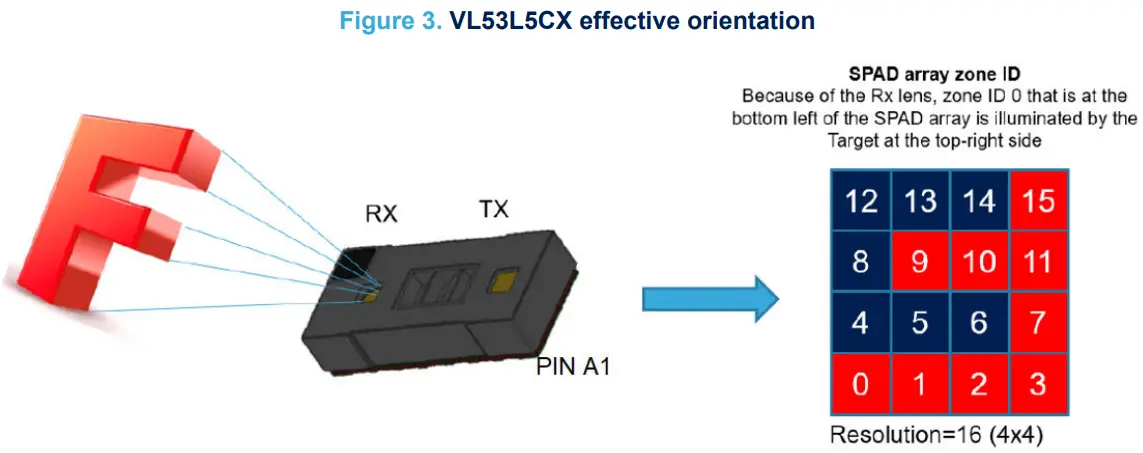
Učinkovita orientacija
Modul vključuje lečo nad zaslonko Rx, ki obrne (vodoravno in navpično) zajeto sliko tarče. Posledično je območje, označeno kot območje 0, v spodnjem levem kotu niza SPAD, osvetljeno s tarčo, ki se nahaja na zgornji desni strani scene.
Sheme in konfiguracija I²C
Za komunikacijo med gonilnikom in vdelano programsko opremo skrbi I²C z zmogljivostjo delovanja do 1 MHz. Izvedba zahteva vlečenje na linijah SCL in SDA. Za več informacij glejte podatkovni list VL53L5CX.
Naprava VL53L5CX ima privzeti naslov I²C 0x52. Vendar pa je mogoče spremeniti privzeti naslov, da se izognete konfliktom z drugimi napravami ali olajšate dodajanje več modulov VL53L5CX v sistem za večjo sistemsko vidnost. Naslov I²C je mogoče spremeniti s funkcijo vl53l5cx_set_i2c_address().
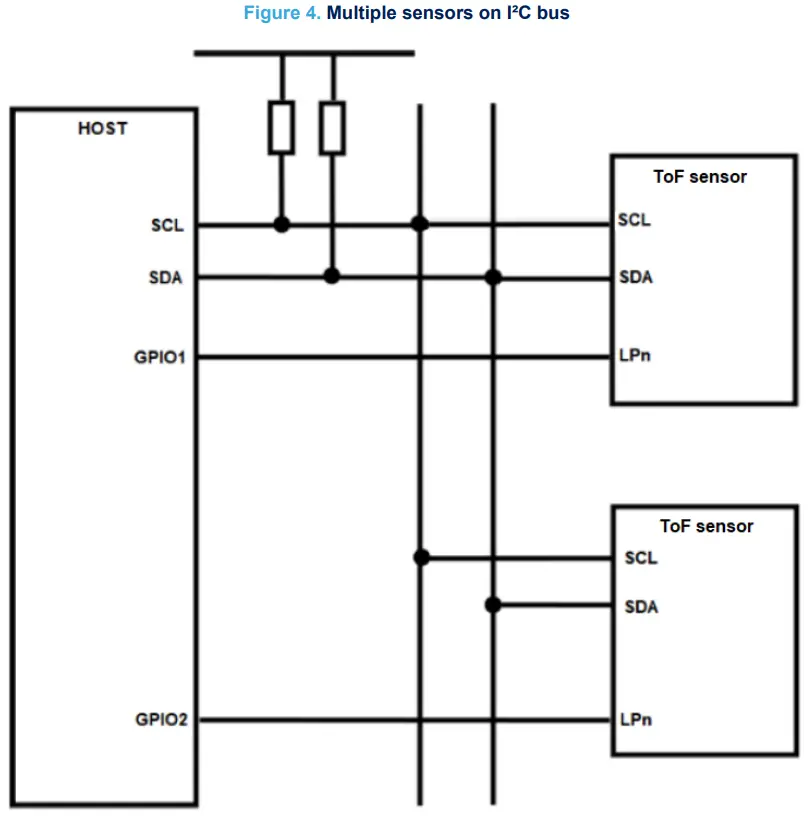
Če želite napravi omogočiti spremembo naslova I²C, ne da bi to vplivalo na druge na vodilu I²C, je pomembno onemogočiti komunikacijo I²C naprav, ki se ne spreminjajo. Postopek je naslednji:
- Vklopite sistem kot običajno.
- Povlecite navzdol pin LPn naprave, ki ji naslov ne bo spremenjen.
- Povlecite navzgor pin LPn naprave, ki ima spremenjen naslov I²C.
- Programirajte naslov I²C za napravo s funkcijo funkcije set_i2c_address().
- Povlecite navzgor pin LPn naprave, ki je ne reprogramirate.
Vse naprave bi morale biti zdaj na voljo na vodilu I²C. Ponovite zgornje korake za vse naprave VL53L5CX v sistemu, ki zahtevajo nov naslov I²C.
Vsebina paketa in pretok podatkov
Arhitektura gonilnika in vsebina
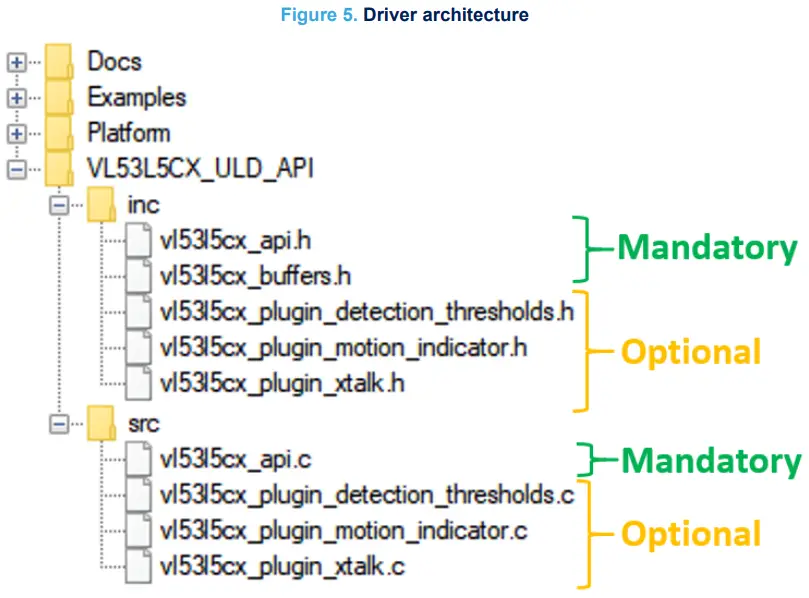
Paket VL53L5CX ULD je sestavljen iz štirih map. Gonilnik se nahaja v mapi / VL53L5CX_ULD_API.
Voznik je sestavljen iz obveznih in neobveznih files. Neobvezno files so plugins uporablja se za razširitev funkcij ULD.
Vsak vtičnik se začne z besedo »vl53l5cx_plugin« (npr. vl53l5cx_plugin_xtalk.h). Če uporabnik ne želi predlaganega plugins, jih je mogoče odstraniti, ne da bi to vplivalo na druge funkcije gonilnika. Naslednja slika predstavlja obvezno files in neobvezno plugins.
Uporabnik mora implementirati tudi dva filese nahaja v mapi /Platforma. Predlagana platforma je prazna lupina in jo je treba napolniti z namenskimi funkcijami.
Opomba: Platforma.h file vsebuje obvezne makre za uporabo ULD. Vse file vsebina je obvezna za pravilno uporabo ULD.
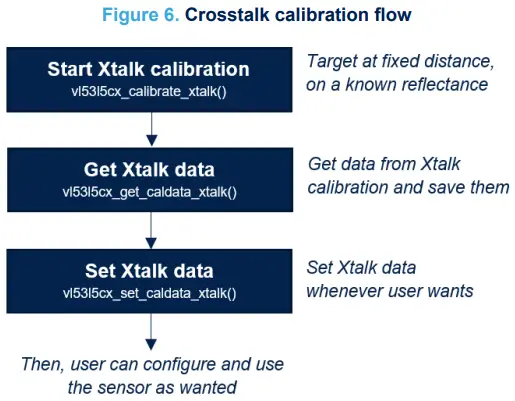
Kalibracijski tok
Navzkrižni presluh (Xtalk) je definiran kot količina signala, prejetega na nizu SPAD, ki je posledica odboja svetlobe VCSEL znotraj zaščitnega okna (pokrivnega stekla), dodanega na vrhu modula. Modul VL53L5CX je samokalibriran in ga je mogoče uporabljati brez dodatne kalibracije.
Če je modul zaščiten s pokrovnim steklom, bo morda potrebna kalibracija preslušavanja. VL53L5CX je zaradi histogramskega algoritma odporen na preslušavanje nad 60 cm. Vendar pa je na kratkih razdaljah pod 60 cm lahko Xtalk večji od dejanskega vrnjenega signala. To povzroči lažno branje tarče ali povzroči, da so tarče videti bližje, kot so v resnici. Vse funkcije kalibracije preslušavanja so vključene v vtičnik Xtalk (izbirno). Uporabnik mora uporabiti file 'vl53l5cx_plugin_xtalk'.
Presluh je mogoče umeriti enkrat, podatke pa je mogoče shraniti, da jih je mogoče pozneje ponovno uporabiti. Zahtevana je tarča na fiksni razdalji z znano odbojnostjo. Najmanjša zahtevana razdalja je 600 mm, tarča pa mora pokrivati celotno vidno polje. Odvisno od nastavitve lahko uporabnik spremeni nastavitve za prilagoditev kalibracije presluha, kot je predlagano v naslednji tabeli.
Tabela 1. Razpoložljive nastavitve za kalibracijo
| Nastavitev | Min | Predlaga STMicroelectronics | Maks |
| Razdalja [mm] | 600 | 600 | 3000 |
| Število samples | 1 | 4 | 16 |
| Odboj [%] | 1 | 3 | 99 |
Opomba: Povečanje števila samples poveča natančnost, vendar tudi podaljša čas za kalibracijo. Čas glede na število sampje linearna in vrednosti sledijo približni časovni omejitvi:
- 1 sample ≈ 1 sekunda
- 4 sampmanj ≈ 2.5 sekunde
- 16 sampmanj ≈ 8.5 sekunde
Umerjanje se izvede s funkcijo vl53l5cx_calibrate_xtalk(). To funkcijo lahko uporabite kadar koli. Vendar je treba senzor najprej inicializirati. Naslednja slika predstavlja tok kalibracije presluha.
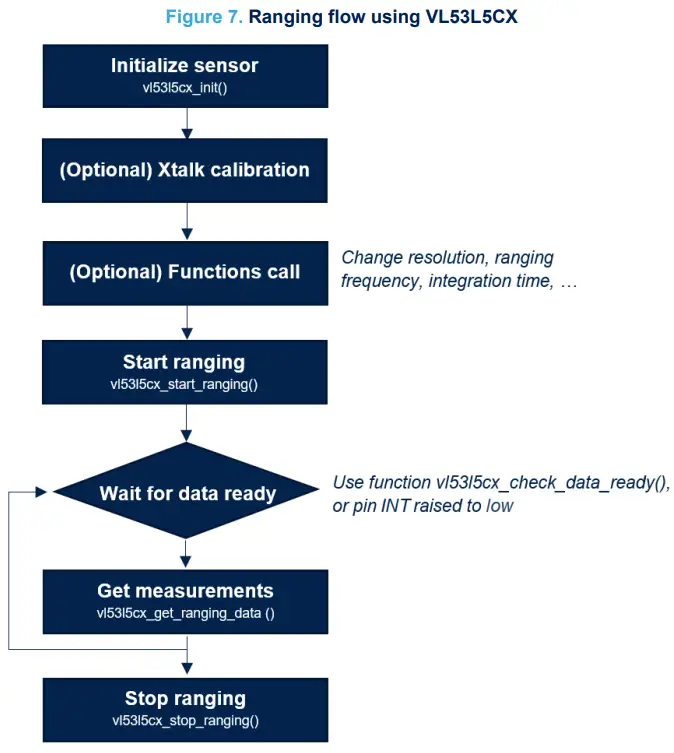
Razponski tok
Naslednja slika predstavlja pretok razdalje, ki se uporablja za meritve. Pred začetkom seje določanja razpona je treba uporabiti kalibracijo Xtalk in izbirne funkcijske klice. Funkcij pridobivanja/nastavljanja ni mogoče uporabiti med sejo določanja obsega in programiranje 'on-the-fly' ni podprto.
Funkcije, ki so na voljo
VL53L5CX ULD API vključuje več funkcij, ki uporabniku omogočajo nastavitev senzorja glede na primer uporabe. Vse funkcije, ki so na voljo vozniku, so opisane v naslednjih razdelkih.
Inicializacija
Pred uporabo senzorja VL53L5CX je treba izvesti inicializacijo. Ta operacija od uporabnika zahteva:
- Vklopite senzor (zatiči VDDIO, AVDD, LPn nastavljeni na High in pin I2C_RST nastavljen na 0)
- Pokličite funkcijo vl53l5cx_init(). Funkcija kopira vdelano programsko opremo (~84 Kbajtov) v modul. To storite tako, da naložite kodo prek vmesnika I²C in izvedete zagonsko rutino za dokončanje inicializacije.
Upravljanje ponastavitve senzorja
Za ponastavitev naprave je treba preklopiti naslednje zatiče:
- Nastavite nožice VDDIO, AVDD in LPn na nizko.
- Počakajte 10 ms.
- Nastavite nožice VDDIO, AVDD in LPn na visoko.
Opomba: Preklapljanje le I2C_RST pina ponastavi komunikacijo I²C.
Resolucija
Ločljivost ustreza številu razpoložljivih območij. Senzor VL53L5CX ima dve možni ločljivosti: 4×4 (16 con) in 8×8 (64 con). Privzeto je senzor programiran v 4×4.
Funkcija vl53l5cx_set_resolution() omogoča uporabniku spreminjanje ločljivosti. Ker je frekvenca določanja obsega odvisna od ločljivosti, je treba to funkcijo uporabiti pred posodobitvijo frekvence določanja obsega. Poleg tega spreminjanje ločljivosti poveča tudi obseg prometa na vodilu I²C, ko se preberejo rezultati.
Frekvenca dometa
Frekvenco merjenja lahko uporabite za spreminjanje frekvence merjenja. Ker se največja frekvenca med ločljivostmi 4×4 in 8×8 razlikuje, je treba to funkcijo uporabiti po izbiri ločljivosti. Najmanjše in največje dovoljene vrednosti so navedene v naslednji tabeli.
Tabela 2. Najmanjša in največja frekvenca razdalje
| Resolucija | Najmanjša frekvenca razdalje [Hz] | Največja frekvenca razdalje [Hz] |
| 4×4 | 1 | 60 |
| 8×8 | 1 | 15 |
Frekvenco dometa je mogoče posodobiti s funkcijo vl53l5cx_set_ranging_frequency_hz(). Privzeto je frekvenca določanja obsega nastavljena na 1 Hz.
Način določanja razdalje
Način določanja obsega omogoča uporabniku izbiro med doseganjem visoke zmogljivosti ali nizko porabo energije. Predlagana sta dva načina:
- Neprekinjeno: Naprava neprekinjeno zajema okvirje s frekvenco razdalje, ki jo določi uporabnik. VCSEL je omogočen med vsem določanjem razdalje, zato sta največja razdalja dosega in odpornost okolja boljši. Ta način je priporočljiv za hitre meritve ali visoke zmogljivosti.
- Avtonomno: To je privzeti način. Naprava nenehno zajema okvirje s frekvenco razpona, ki jo določi uporabnik. VCSEL je omogočen v obdobju, ki ga določi uporabnik s funkcijo vl53l5cx_set_integration_time_ms(). Ker VCSEL ni vedno omogočen, se poraba energije zmanjša. Prednosti so bolj očitne z zmanjšano frekvenco dosega. Ta način je priporočljiv za aplikacije z nizko porabo energije.
Način določanja obsega lahko spremenite s funkcijo vl53l5cx_set_ranging_mode().
Čas integracije
Integracijski čas je funkcija, ki je na voljo samo v načinu avtonomnega določanja obsega (glejte razdelek 4.5: Način določanja obsega). Uporabniku omogoča spreminjanje časa, medtem ko je VCSEL omogočen. Spreminjanje časa integracije, če je način določanja obsega nastavljen na neprekinjeno, nima učinka. Privzeti čas integracije je nastavljen na 5 ms.
Učinek časa integracije je drugačen za ločljivosti 4×4 in 8×8. Ločljivost 4 × 4 je sestavljena iz enega integracijskega časa, ločljivost 8 × 8 pa je sestavljena iz štirih integracijskih časov. Naslednje številke predstavljajo emisijo VCSEL za obe ločljivosti.
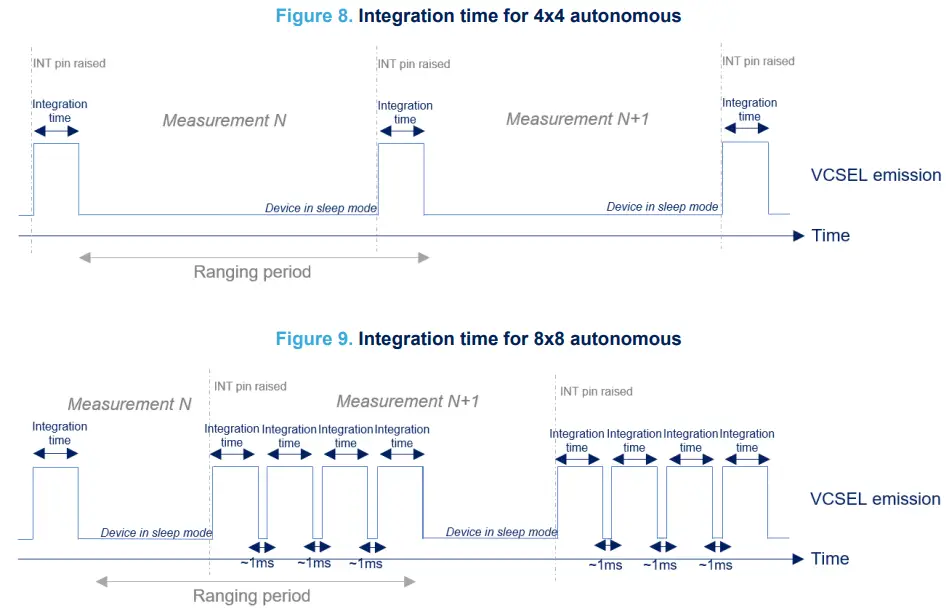
Vsota vseh integracijskih časov + 1 ms obremenitev mora biti nižja od obdobja merjenja. V nasprotnem primeru se obdobje razpona samodejno poveča.
Načini moči
Načine napajanja lahko uporabite za zmanjšanje porabe energije, ko naprave ne uporabljate. VL53L5CX lahko deluje v enem od naslednjih načinov napajanja:
- Prebujanje: Naprava je nastavljena na mirovanje HP (velika moč) in čaka na navodila.
- Spanje: Naprava je nastavljena na mirovanje LP (nizka poraba), stanje nizke porabe. Naprave ni mogoče uporabljati, dokler ni nastavljena v način bujenja.
Ta način ohrani vdelano programsko opremo in konfiguracijo.
Način napajanja lahko spremenite s funkcijo vl53l5cx_set_power_mode(). Privzeti način je bujenje.
Opomba: Če želi uporabnik spremeniti način napajanja, naprava ne sme biti v stanju dosega.
Šilček
Signal, ki ga vrne cilj, ni čist impulz z ostrimi robovi. Robovi so nagnjeni in lahko vplivajo na razdalje, ki so sporočene v sosednjih območjih. Ostrilec se uporablja za odstranitev dela ali celotnega signala, ki ga povzroča zastrti odsev.
Bivšiample, prikazan na naslednji sliki, predstavlja bližnjo tarčo na 100 mm s središčem v vidnem polju in drugo tarčo, bolj zadaj na 500 mm. Odvisno od vrednosti ostrenja se lahko bližnja tarča pojavi v več območjih kot dejanska.
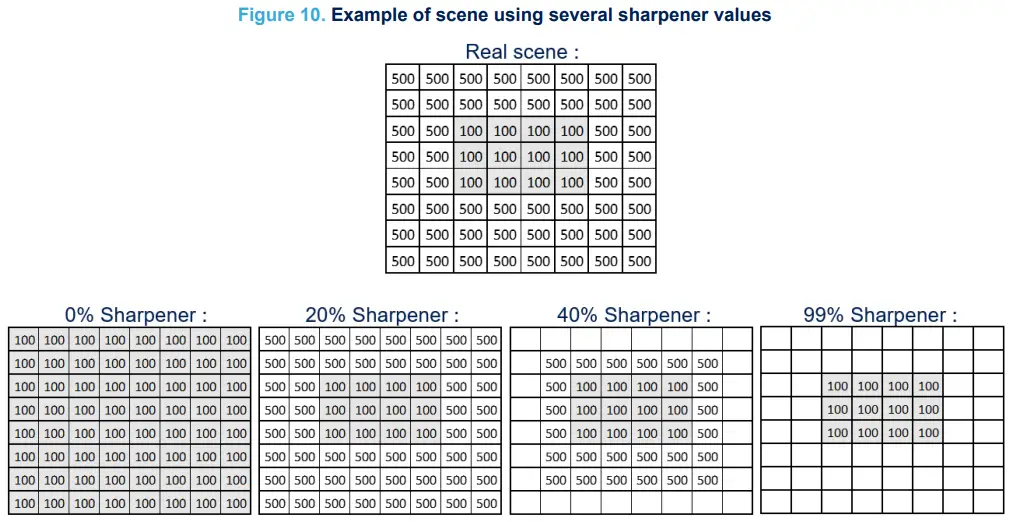
Ostrilo lahko spremenite s funkcijo vl53l5cx_set_sharpener_percent(). Dovoljene vrednosti so med 0 % in 99 %. Privzeta vrednost je 5 %.
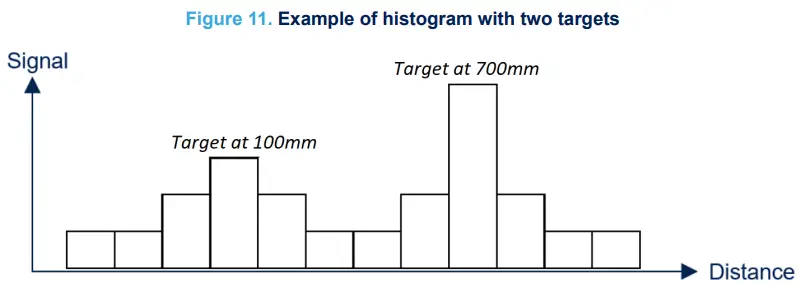
Ciljni vrstni red
VL53L5CX lahko meri več ciljev na območje. Zahvaljujoč obdelavi histograma lahko gostitelj izbere vrstni red prijavljenih ciljev. Obstajata dve možnosti:
- Najbližje: Najbližja tarča je prva prijavljena
- Najmočnejši: najmočnejši cilj je prvi prijavljeni
Ciljni vrstni red lahko spremenite s funkcijo vl53l5cx_set_target_order(). Privzeti vrstni red je Najmočnejši.
Bivšiample na naslednji sliki predstavlja zaznavanje dveh tarč. Ena na 100 mm z nizko refleksijo in ena na 700 mm z visoko refleksijo.
Več tarč na cono
VL53L5CX lahko meri do štiri tarče na območje. Uporabnik lahko konfigurira število tarč, ki jih vrne senzor.
Opomba: Najmanjša razdalja med dvema ciljema, ki ju je treba zaznati, je 600 mm.
Izbira ni možna pri vozniku; to je treba narediti v 'Platform.h' file. Makro VL53L5CX_NB_ TARGET_PER_ZONE mora biti nastavljen na vrednost med 1 in 4. Ciljni vrstni red, opisan v razdelku 4.9: Ciljni vrstni red neposredno vpliva na vrstni red zaznanega cilja. Privzeto senzor odda največ en cilj na območje.
Opomba: Povečano število ciljev na območje poveča zahtevano velikost RAM-a
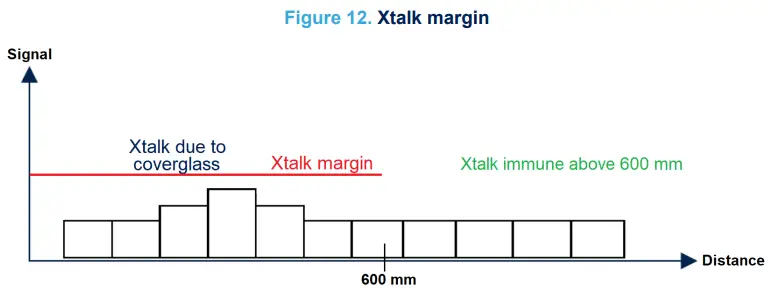
rob Xtalk
Rob Xtalk je dodatna funkcija, ki je na voljo samo z uporabo vtičnika Xtalk. .c in .f fileUporabiti je treba 'vl53l5cx_plugin_xtalk'.
Rob se uporablja za spreminjanje praga zaznavanja, ko je na vrhu senzorja prisotno pokrivno steklo. Prag je mogoče povečati, da zagotovite, da pokrovno steklo ni nikoli zaznano, po nastavitvi kalibracijskih podatkov o preslušavanju. Na primerample, lahko uporabnik zažene kalibracijo preslušavanja na eni sami napravi in znova uporabi iste kalibracijske podatke za vse druge naprave. Rob Xtalk lahko uporabite za prilagoditev popravka presluha. Spodnja slika predstavlja rob Xtalk.
Pragovi zaznavanja
Poleg običajnih zmožnosti določanja razdalje je senzor mogoče programirati tako, da zazna predmet pod določenimi vnaprej določenimi kriteriji. Ta funkcija je na voljo z uporabo vtičnika »pragi zaznavanja«, ki je možnost, ki ni privzeto vključena v API. The fileUporabiti je treba 'vl53l5cx_plugin_detection_thresholds'.
Funkcijo je mogoče uporabiti za sprožitev prekinitve na pinu A3 (INT), ko so izpolnjeni pogoji, ki jih določi uporabnik. Obstajajo tri možne konfiguracije:
- Ločljivost 4 × 4: uporaba enega praga na območje (skupno 16 pragov)
- Ločljivost 4 × 4: uporaba dveh pragov na območje (skupno 32 pragov)
- Ločljivost 8 × 8: uporaba enega praga na območje (skupno 64 pragov)
Ne glede na uporabljeno konfiguracijo sta postopek za ustvarjanje pragov in velikost RAM-a enaka. Za vsako kombinacijo pragov je treba izpolniti več polj: - Zone id: ID izbranega območja (glejte razdelek 2.2: Učinkovita orientacija)
- Meritev: meritev za ulov (razdalja, signal, število SPAD-jev, …)
- Vrsta: okna meritev (v oknih, izven oken, pod nizkim pragom, …)
- Nizek prag: uporabnik nizkega praga za sprožilec. Uporabniku ni treba nastaviti formata, samodejno ga obravnava API.
- High threshold: uporabnik z visokim pragom za sprožilec. Uporabniku ni treba nastaviti formata; samodejno ga obravnava API.
- Matematična operacija: uporablja se samo za 4×4 – 2 kombinaciji pragov na območje. Uporabnik lahko nastavi kombinacijo z uporabo več pragov v enem območju.
Indikator gibanja
Senzor VL53L5CX ima vgrajeno funkcijo vdelane programske opreme, ki omogoča zaznavanje gibanja v prizoru. Indikator gibanja se izračuna med zaporednimi sličicami. Ta možnost je na voljo z vtičnikom 'vl53l5cx_plugin_motion_indicator'.
Indikator gibanja se inicializira s funkcijo vl53l5cx_motion_indicator_init(). Če želite spremeniti ločljivost senzorja, posodobite ločljivost indikatorja gibanja z namensko funkcijo: vl53l5cx_motion_indicator_set_resolution().
Uporabnik lahko spremeni tudi najmanjšo in največjo razdaljo za zaznavanje gibanja. Razlika med najmanjšo in največjo razdaljo ne sme biti večja od 1500 mm. Privzeto so razdalje inicializirane z vrednostmi med 400 mm in 1500 mm.
Rezultati so shranjeni v polju 'motion_indicator'. V tem polju matrika 'motion' daje vrednost, ki vsebuje intenzivnost gibanja na območje. Visoka vrednost pomeni veliko variacijo gibanja med sličicami. Običajno gibanje daje vrednost med 100 in 500. Ta občutljivost je odvisna od časa integracije, ciljne razdalje in ciljne refleksije.
Idealna kombinacija za aplikacije z nizko porabo energije je uporaba indikatorja gibanja z avtonomnim načinom določanja obsega in pragov zaznavanja, programiranih glede na gibanje. To omogoča zaznavanje variacij gibanja v FoV z minimalno porabo energije.
Periodična temperaturna kompenzacija
Na zmogljivost določanja razdalje vplivajo temperaturna nihanja. Senzor VL53L5CX ima vgrajeno temperaturno kompenzacijo, ki se kalibrira enkrat, ko se pretakanje začne. Če pa se temperatura spremeni, kompenzacija morda ne bo usklajena z novo temperaturo. Da bi se izognili tej težavi, lahko stranka zažene periodično temperaturno kompenzacijo z uporabo samodejnega VHV. Periodična kalibracija temperature traja nekaj milisekund. Uporabnik lahko določi obdobje.
Za uporabo te funkcije mora stranka:
• Pokličite funkcijo vl53l5cx_set_VHV_repeat_count().
• Nato kot argument navedite število sličic med vsako novo kalibracijo.
Če je argument 0, je kompenzacija onemogočena.
Razvrščanje rezultatov
Razpoložljivi podatki
Med dejavnostmi določanja razdalje se lahko izpiše obsežen seznam ciljev in podatkov o okolju. Naslednja tabela opisuje parametre, ki so na voljo uporabniku.
Tabela 3. Razpoložljiv izhod s senzorjem VL53L5CX
| Element | Nb bajtov (RAM) | Enota | Opis |
| Ambient na SPAD | 256 | Kcps/SPAD | Merjenje ambientalne hitrosti, izvedeno na nizu SPAD, brez aktivne emisije fotonov, za merjenje ambientalne hitrosti signala zaradi šuma. |
| Število odkritih ciljev | 64 | Noben | Število odkritih ciljev v trenutnem območju. To vrednost bi morali najprej preveriti, da bi ugotovili veljavnost meritve. |
| Število omogočenih SPAD | 256 | Noben | Število SPAD-jev, omogočenih za trenutno meritev. Daleč ali nizko odsevna tarča aktivira več SPAD. |
| Signal na SPAD | 256 x nb programiranih ciljev | Kcps/SPAD | Količina fotonov, izmerjena med impulzom VCSEL. |
| Razpon sigma | 128 x nb programiranih ciljev | Milimeter | Ocenjevalnik sigma za hrup v prijavljeni ciljni razdalji. |
| Razdalja | 128 x nb programiranih ciljev | Milimeter | Ciljna razdalja |
| Ciljno stanje | 64 x nb programiranih ciljev | Noben | Veljavnost meritev. Glej Razdelek 5.5: Rezultati tolmačenje za več informacij. |
| Odbojnost | 64 x število programiranih tarč | Odstotek | Ocenjena ciljna refleksija v odstotkih |
| Indikator gibanja | 140 | Noben | Struktura, ki vsebuje rezultate indikatorja gibanja. Polje 'gibanje' vsebuje intenzivnost gibanja. |
Opomba: Za več elementov (signal na spad, sigma, …) je dostop do podatkov drugačen, če je uporabnik programiral več kot eno tarčo na cono (glejte razdelek 4.10: Več tarč na cono). Glej prample kode za več informacij.
Prilagodite izbiro izhoda
Privzeto so omogočeni vsi izhodi VL53L5CX. Po potrebi lahko uporabnik onemogoči nekatere izhode senzorjev.
Onemogočanje meritev ni na voljo v gonilniku; izvesti ga je treba v 'Platform.h' file. Uporabnik lahko deklarira naslednje makre, da onemogoči izhode:
#define VL53L5CX_DISABLE_AMBIENT_PER_SPAD
#define VL53L5CX_DISABLE_NB_SPADS_ENABLED
#define VL53L5CX_DISABLE_NB_TARGET_DETECTED
#define VL53L5CX_DISABLE_SIGNAL_PER_SPAD
#define VL53L5CX_DISABLE_RANGE_SIGMA_MM
#define VL53L5CX_DISABLE_DISTANCE_MM
#define VL53L5CX_DISABLE_TARGET_STATUS
#define VL53L5CX_DISABLE_REFLECTANCE_PERCENT
#define VL53L5CX_DISABLE_MOTION_INDICATOR
Posledično polja niso deklarirana v strukturi rezultatov in podatki se ne prenesejo v gostitelja. Velikost RAM-a in velikost I²C sta zmanjšani.
Da bi zagotovili doslednost podatkov, ST vedno priporoča, da sta "število zaznanih ciljev" in "status cilja" omogočena. To filtrira meritve glede na ciljni status (glejte razdelek 5.5: Interpretacija rezultatov).
Pridobivanje razponskih rezultatov
Med sejo določanja obsega lahko na dva načina ugotovite, ali so na voljo novi podatki o določanju obsega:
- Način pozivanja: neprekinjeno uporablja funkcijo vl53l5cx_check_data_ready(). Zazna novo število tokov, ki ga vrne senzor.
- Prekinitveni način: čaka na prekinitev, sproženo na nožici A3 (GPIO1). Prekinitev se samodejno počisti po ~100 μs.
Ko so novi podatki pripravljeni, je mogoče rezultate prebrati s funkcijo vl53l5cx_get_ranging_data(). Vrne posodobljeno strukturo, ki vsebuje vse izbrane izhodne podatke. Ker je naprava asinhrona, ni prekinitve, ki bi jo bilo treba izbrisati za nadaljevanje seje določanja obsega.
Ta funkcija je na voljo za neprekinjen in avtonomni način določanja obsega.
Uporaba neobdelane oblike vdelane programske opreme
Po prenosu podatkov o razponu prek I²C pride do pretvorbe med formatom vdelane programske opreme in formatom gostitelja. Ta operacija se običajno izvede, da je razdalja v milimetrih kot privzeti izhod senzorja. Če želi uporabnik uporabiti format vdelane programske opreme, mora biti v platformi definiran naslednji makro file: VL53L5CX
#define VL53L5CX_USE_RAW_FORMAT
Interpretacija rezultatov
Podatke, ki jih vrne VL53L5CX, je mogoče filtrirati, da se upošteva ciljni status. Status označuje veljavnost meritve. Celoten seznam statusov je opisan v naslednji tabeli.
Tabela 4. Seznam razpoložljivih ciljnih statusov
| Ciljno stanje | Opis |
| 0 | Podatki o razponu se ne posodabljajo |
| 1 | Stopnja signala je prenizka na nizu SPAD |
| 2 | Ciljna faza |
| 3 | Ocenjevalnik sigma je previsok |
| 4 | Ciljna skladnost ni uspela |
| 5 | Razpon veljaven |
| 6 | Zavijanje ni izvedeno (običajno prvi obseg) |
| 7 | Doslednost stopnje ni uspela |
| 8 | Stopnja signala je prenizka za trenutni cilj |
| 9 | Domet velja z velikim utripom (morda zaradi združenega cilja) |
| 10 | Domet je veljaven, vendar na prejšnjem dosegu ni bila zaznana nobena tarča |
| 11 | Doslednost meritev ni uspela |
| 12 | Zaradi ostrila je tarča zamegljena z drugo |
| 13 | Tarča zaznana, vendar nedosledni podatki. Pogosto se zgodi pri sekundarnih ciljih. |
| 255 | Ni zaznanega cilja (samo če je omogočeno število zaznanih ciljev) |
Za dosledne podatke mora uporabnik filtrirati neveljavno ciljno stanje. Za oceno zaupanja se cilj s statusom 5 šteje za 100-odstotno veljaven. Stanje 6 ali 9 se lahko obravnava z vrednostjo zaupanja 50 %. Vsa druga stanja so pod 50-odstotno stopnjo zaupanja.
Napake gonilnika
Ko pride do napake pri uporabi senzorja VL53L5CX, gonilnik vrne določeno napako. Naslednja tabela navaja možne napake.
Tabela 5. Seznam napak, ki so na voljo z gonilnikom
| Ciljno stanje | Opis |
| 0 | Brez napake |
|
127 |
Uporabnik je programiral napačno nastavitev
(neznana ločljivost, previsoka frekvenca razpona, …) |
| 255 | Večja napaka. Običajno napaka časovne omejitve zaradi napake I²C. |
| drugo | Zgoraj opisana kombinacija več napak |
Opomba: Gostitelj lahko implementira več kod napak z uporabo platforme files.
Zgodovina revizij
Tabela 6. Zgodovina revizij dokumenta
| Datum | Različica | Spremembe |
| 21. junij 2021 | 1 | Začetna izdaja |
| 30-avg-2021 | 2 | Dodano Razdelek 5.4: Uporaba neobdelane oblike vdelane programske opreme
Dodan nov ciljni status 13 in Tabela 4. Seznam razpoložljivih ciljnih statusov |
| 05. september 2022 | 3 | Dodana opomba o najmanjši najmanjši razdalji med tarčami Razdelek 4.10: Več tarč na cono |
| 10-avg-2023 | 4 | Spremenjeno Slika 11. Prample histograma z dvema ciljema |
| 21-2024.feb | 5 | Dodan VHV (zelo visoka voltage) do Razdelek 1: Kratice in okrajšave. Dodano Razdelek 4.14: Periodična temperaturna kompenzacija |
POMEMBNO OBVESTILO – POZORNO PREBERITE
STMicroelectronics NV in njegove hčerinske družbe (»ST«) si pridržujejo pravico do sprememb, popravkov, izboljšav, modifikacij in izboljšav izdelkov ST in/ali tega dokumenta kadar koli brez predhodnega obvestila. Kupci morajo pred oddajo naročil pridobiti najnovejše ustrezne informacije o izdelkih ST. Izdelki ST se prodajajo v skladu s prodajnimi pogoji ST, ki veljajo v času potrditve naročila.
Kupci so izključno odgovorni za izbiro, izbiro in uporabo izdelkov ST in ST ne prevzema nobene odgovornosti za pomoč pri uporabi ali oblikovanje izdelkov kupcev.
ST v tem dokumentu ne podeljuje nobene licence, izrecne ali implicitne, za katero koli pravico do intelektualne lastnine.
Nadaljnja prodaja izdelkov ST z določbami, ki se razlikujejo od informacij, navedenih v tem dokumentu, razveljavi vsako garancijo, ki jo ST odobri za tak izdelek.
ST in logotip ST sta blagovni znamki ST. Za dodatne informacije o blagovnih znamkah ST glejte www.st.com/trademarks. Vsa druga imena izdelkov ali storitev so last njihovih lastnikov.
Informacije v tem dokumentu prevladajo in nadomeščajo informacije, ki so bile predhodno navedene v kateri koli prejšnji različici tega dokumenta.
© 2024 STMicroelectronics – Vse pravice pridržane

Dokumenti / Viri
 |
STMicroelectronics VL53L5CX Multizone senzor za določanje razdalje časa leta [pdfUporabniški priročnik VL53L5CX večconski senzor za določanje razdalje časa leta, VL53L5CX, večconski senzor za določanje razdalje časa leta, senzor za določanje razdalje časa leta, senzor razdalje leta, senzor razdalje, senzor |



