Netzer DS-25 17-bitni kodirnik absolutne ločljivosti

Predgovor
- Različica 2.0: november 2021
Veljavni dokumenti
- Podatkovni list električnega dajalnika DS-25
ESD zaščita
Kot običajno za elektronska vezja, se med ravnanjem z izdelkom ne dotikajte elektronskih vezij, žic, konektorjev ali senzorjev brez ustrezne ESD zaščite. Integrator/upravljavec uporablja opremo ESD, da se izogne nevarnosti poškodbe tokokroga.
POZOR
UPOŠTEVAJTE PREVIDNOSTNE UKREPE ZA RAVNANJE Z ELEKTROSTATIČNO OBČUTLJIVimi NAPRAVAMI
Konec izdelkaview
konecview
Električni dajalnik absolutnega položaja DS-25™ je revolucionaren senzor položaja, ki je bil prvotno razvit za kritične aplikacije v težkih okoljih. Trenutno deluje v širokem spektru aplikacij, vključno z obrambo, domovinsko varnostjo, vesoljstvom ter medicinsko in industrijsko avtomatizacijo. Brezkontaktna tehnologija Electric Encoder™ temelji na interakciji med izmerjenim premikom in prostorsko/časovno moduliranim električnim poljem. DS-25 Electric Encoder™ je polmodularen, tj. njegov rotor in stator sta ločena, pri čemer stator varno drži rotor.
- Stator kodirnika
- Rotor kodirnika
- Montaža dajalnika klamps
- Pritrdilni element rotorja
- Kabelski vmesnik

Diagram poteka namestitve
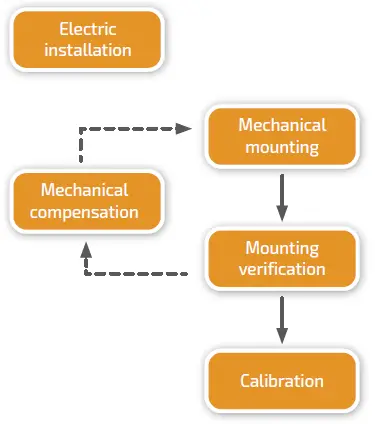
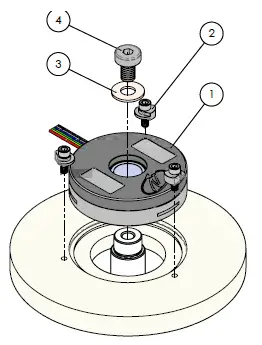
Montaža kodirnika
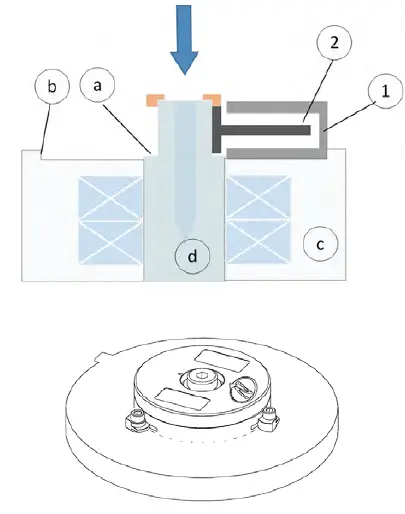
Rotor dajalnika (2) se pritrdi na glavno gred (d) tako, da ga pritisnete na namensko ramo (a), vijak in podložko ali krožno vzmet in podložko na koncu rame za vzdrževanje pritiska, priporočena sila 0.3 Nm z vijakom M3.
Stator dajalnika (1) je centriran z obodno stopnico (b) in pritrjen na stator gostitelja (c) s pomočjo treh dajalnikov clamps, priporočena sila 0.3 Nm s priloženim dajalnikom klamps.
Opomba:
NE uporabljajte materialov za pritrditev vijakov, ki vsebujejo cianoakrilat, ki agresivno delujejo na ohišje senzorja iz Ultem.
Relativni položaj statorja/rotorja kodirnika
Rotor je lebdeč, zato mora biti za pravilno relativno aksialno vgradnjo razdalja "H" med ramo gredi (b) in vdolbino za pritrditev statorja (a) nominalna 1.4 mm.
Za lažjo kompenzacijo mehanske namestitve s podložkami rotorja je priporočena razdalja 1.4 – 0.05 mm, kar zagotavlja analogni izhod. Optimalno priporočeno ampvrednosti svetlosti so srednje vrednosti glede na tiste, prikazane v programski opremi Encoder Explorer, in se razlikujejo glede na vrsto dajalnika.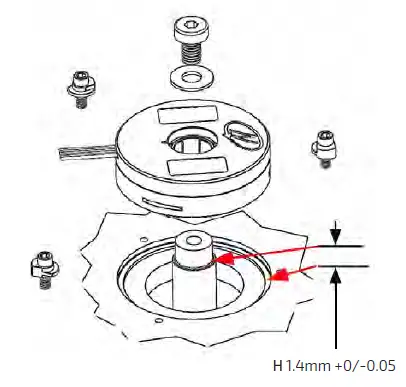
DS-25 amplitudes nadomestilo
Mehanska kompenzacija z uporabo podložk 50 um pod rotorjem (na voljo kot komplet DS-25-R-00) bo povečala ampraven svetlobe za ~ 50mV. Preverite pravilno namestitev rotorja z orodji Encoder Explorer »Signal analizator« ali »Mechanical installation verification«.
Opomba: za več informacij preberite odstavek 6
Razpakiranje
Standardni vrstni red
Paket standardnega DS-25 vsebuje dajalnik z 250 mm oklopljenim kablom AWG30 in kompletom EAPK004 za pritrditev dajalnika kl.amps, (3 klamps, 0-80 UNF Vtični vijak L 3/16", SS )
Izbirni dodatki:
- DS-25-R-00, Komplet podložk rotorja (x10 podložk iz nerjavečega jekla, 50 um vsaka)
- MA-DS25-004, Komplet za namestitev na koncu gredi (vijak M3x5 + podložka)
- CNV-00003, pretvornik RS-422 v USB (Nastavitveni način)
- NanoMIC-KIT-01, pretvornik RS-422 v USB. Načini nastavitve in delovanja prek vmesnika SSi/BiSS.
- DKIT-DS-25-SF-S0, nameščen kodirnik SSi na rotacijski vtičnici, pretvornik RS-422 v USB in kabli.
- DKIT-DS-25-IF-S0, nameščen kodirnik BiSS na rotacijski vtičnici, pretvornik RS-422 v USB in kabli.
Električna medsebojna povezava
To poglavje je ponovnoviews korake, potrebne za električno povezavo kodirnika z digitalnim vmesnikom (SSi ali BiSS-C).
Priključitev kodirnika
Kodirnik ima dva načina delovanja:
Absolutni položaj nad SSi ali BiSS-C:
To je privzeti način za vklop
Barvna koda žic vmesnika SSi / BiSS
| Ura + | siva |
Ura |
| ura – | Modra | |
| Podatki – | Rumena |
podatki |
| Podatki + | zelena | |
| GND | Črna | Tla |
| +5 V | Rdeča | Napajanje |
Način nastavitve prek NCP (komunikacijski protokol Netzer)
Ta servisni način omogoča dostop prek USB-ja do osebnega računalnika, v katerem je nameščena aplikacija Netzer Encoder Explorer (v sistemu MS Windows 7/10). Komunikacija poteka prek komunikacijskega protokola Netzer (NCP) prek RS-422 z uporabo istega niza žic. Za povezavo kodirnika z 9-polnim priključkom tipa D na pretvornik RS-422/USB CNV-0003 ali NanoMIC uporabite naslednjo dodelitev nožic.
Vmesnik električnega kodirnika, tip D 9 pinski ženski
| Opis | barva | funkcija | Pin št |
|
SSi ura / NCP RX |
siva | Ura / RX + | 2 |
| Modra | Ura / RX – | 1 | |
|
Podatki SSi / NCP TX |
Rumena | Podatki / TX – | 4 |
| zelena | Podatki / TX + | 3 | |
| Tla | Črna | GND | 5 |
| Napajanje | Rdeča | +5 V | 8 |
Električni priključek in ozemljitev
Kodirnik NI priložen določenemu kablu in konektorju, vendar upoštevajte pomisleke o ozemljitvi:
- Oklop kabla se ne poveže s povratnim vodom napajanja.
- Ozemljite gostiteljsko gred, da preprečite motnje gostiteljskega sistema, ki bi lahko povzročile notranji šum kodirnika.
Opomba: Potreben je napajalnik 4.75 do 5.25 VDC
Namestitev programske opreme
Programska oprema Electric Encoder Explorer (EEE):
- Preverja pravilnost mehanske namestitve
- Umerjanje odmikov
- Nastavi splošno in signalno analizo
To poglavje je ponovnoviews korake, povezane z namestitvijo programske aplikacije EEE.
Minimalne zahteve
- Operacijski sistem: MS windows 7/10, (32/64 bit)
- Pomnilnik: Najmanj 4 MB
- Komunikacijska vrata: USB 2
- Windows .NET Framework, najmanj V4
Namestitev programske opreme
- Zaženite Electric Encoder™ Explorer file našli na Netzerju webspletno mesto: Programska orodja Encoder Explorer
- Po namestitvi boste na namizju računalnika videli ikono programske opreme Electric Encoder Explorer.
- Za začetek kliknite ikono programske opreme Electric Encoder Explorer.
Preverjanje montaže
Zagon Encoder Explorerja
Poskrbite, da boste uspešno opravili naslednje naloge:
- Mehanska montaža
- Električna povezava
- Priključitev kodirnika za kalibracijo
- Namestitev programske opreme Encoder Explore
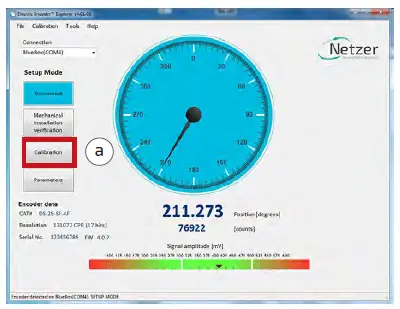
Zaženite orodje Electric Encoder Explorer (EEE)
Zagotovite pravilno komunikacijo s kodirnikom: (privzeto nastavitveni način).
- Vrstica stanja označuje uspešno komunikacijo.
- Podatki kodirnika se prikažejo v območju podatkov kodirnika. (CAT št., serijska št.)
- Prikazovalnik položaja se odziva na vrtenje gredi.
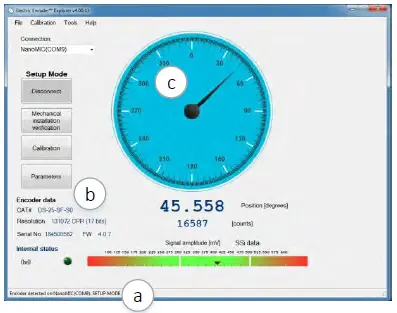
Pred kalibracijo izvedite preverjanje namestitve in izbiro smeri vrtenja, da zagotovite optimalno delovanje. Priporočljivo je tudi, da opazujete namestitev v oknu [Orodja – Analizator signala].Preverjanje mehanske namestitve
Preverjanje mehanske namestitve zagotavlja postopek, ki bo zagotovil pravilno mehansko pritrditev z zbiranjem neobdelanih podatkov o finih in grobih kanalih med vrtenjem. - Na glavnem zaslonu izberite [Mechanical Mounting Verification].

- Izberite [Start], da začnete zbiranje podatkov.
- Zavrtite gred, da zberete podatke o finih in grobih kanalih.
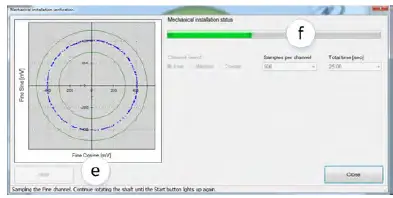
- Na koncu uspešnega preverjanja bo programska oprema prikazala »Pravilna mehanska namestitev«.
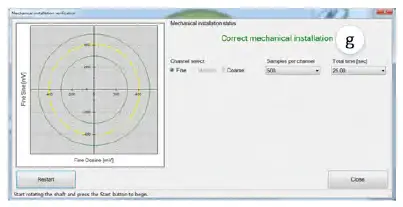
- Če programska oprema kaže »Nepravilna mehanska namestitev«, popravite mehanski položaj rotorja, kot je predstavljeno v odstavku 3.3 – »Relativni položaj rotorja«.

Umerjanje
Nova funkcija
Možnost samodejnega umerjanja je omogočena. Glejte dokument: Auto-calibration-feature-user-manual-V01
Offset kalibracija
Za optimalno delovanje električnih dajalnikov je treba neizogiben enosmerni odmik sinusnih in kosinusnih signalov kompenzirati v delovnem sektorju.
Po uspešnem zaključku postopka preverjanja namestitve:
- Na glavnem zaslonu izberite [Calibration].
- Med vrtenjem gredi zaženite zajemanje podatkov. Vrstica napredka (c) označuje napredek zbiranja. Med zbiranjem podatkov dosledno obračajte os - pokriva delovni sektor aplikacije od konca do konca. Privzeto postopek zbere 500 točk v 75 sekundah. Hitrost vrtenja ni parameter med zbiranjem podatkov. Indikacija zbiranja podatkov kaže, da se za fine/grobe kanale v sredini (d) (e) pojavi jasen "tanek" krog z nekaj odmika.
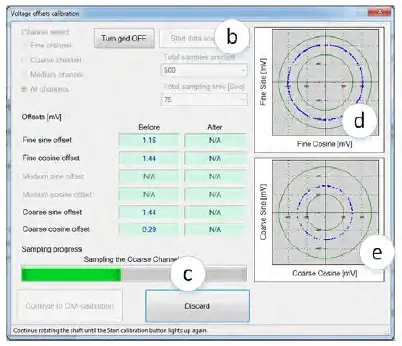
Fini / Corse kanal s kompenziranim zamikom 
CAA kalibracija
Naslednja kalibracija poravna grobi/fini kanal z zbiranjem podatkov iz vsake točke obeh kanalov. Izberite [Continue to CAA Calibration] V oknu za umerjanje kota CAA izberite ustrezen gumb možnosti med možnostmi merilnega območja (a):
- Polno mehansko vrtenje – gibanje gredi je več kot 10 stopinj – priporočljivo.
- Omejen odsek – določite delovanje gredi v omejenem kotu, določenem s stopinjami, v primeru <10 stopinj
- Brezplačno sampling modes – v besedilnem polju določite število kalibracijskih točk v skupnem številu točk. Sistem privzeto prikaže priporočeno število točk. Zberite najmanj devet točk nad delovnim sektorjem.
- Kliknite gumb [Začni kalibracijo] (b)
- Status (c) označuje naslednjo zahtevano operacijo; stanje gibanja gredi; trenutni položaj in naslednji ciljni položaj, na katerega naj se zavrti kodirnik.
- Zavrtite gred/koder v naslednji položaj in kliknite gumb [Nadaljuj] (c)
- gred naj med zbiranjem podatkov miruje. Sledite indikaciji/interakcijam med cikličnim postopkom za pozicioniranje gredi –> mirovanje –> izračun branja.
- Ponovite zgornji korak za vse definirane točke. Končaj (d)
- Kliknite gumb [Shrani in nadaljuj] (e).
V zadnjem koraku se shranijo parametri CAA za odmike, s čimer se zaključi postopek umerjanja.
Nastavitev ničelne točke dajalnika
Ničelni položaj je mogoče določiti kjerkoli v delovnem sektorju. Zavrtite gred v želeni ničelni mehanski položaj. Pojdite na gumb »Calibration« v zgornji menijski vrstici in pritisnite »Set UZP«. Z ustrezno možnostjo izberite »Nastavi trenutni položaj« na nič in kliknite [Dokončaj].
Test tresenja
Izvedite test tresenja, da ocenite kakovost namestitve; test tresenja predstavlja statistiko odčitkov absolutnih položajev (štetja) skozi čas. Običajno tresenje mora biti +/- 3 štetje; večje tresenje lahko kaže na sistemski šum.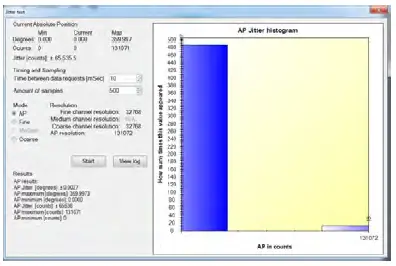
Če podatki o branju (modre pike) niso enakomerno porazdeljeni na tankem krogu, lahko pride do "šuma" v vaši namestitvi (preverite ozemljitev gredi/statorja).
Način delovanja
SSi/BiSS
Indikacija načina delovanja vmesnika kodirnika SSi / BiSS je na voljo z uporabo NanoMIC. Za več informacij preberite o NanoMIC na Netzerju webspletno mesto Način delovanja predstavlja "pravi" vmesnik SSi / BiSS s taktom 1MHz.
Protokol SSi
Protokol BiSS

Mehanske risbe

Če ni določeno drugače
| Mere so v: mm | Površinska obdelava: N6 |
Linearne tolerance
| 0.5-4.9: ±0.05 mm | 5-30: ±0.1 mm |
| 31-120: ±0.15 mm | 121-400: ±0.2 mm |
DS-25 s kovinskim tulcem rotorja


Če ni določeno drugače
| Mere so v: mm | Površinska obdelava: N6 |
Linearne tolerance
| 0.5-4.9: ±0.05 mm | 5-30: ±0.1 mm |
| 31-120: ±0.15 mm | 121-400: ±0.2 mm |
Gred – končna namestitev (korak)

Če ni določeno drugače
| Mere so v: mm | Površinska obdelava: N6 |
Linearne tolerance
| 0.5-4.9: ±0.05 mm | 5-30: ±0.1 mm |
| 31-120: ±0.15 mm | 121-400: ±0.2 mm |
Brez dela/opisa/KOL
| 1 | DS-25 | Vključeno | kodirnik DS-25 | 1 | |
| 2 | EAPK004 | Vključeno | Komplet 0-80” | 3 x kodirnik klamps najlon | 1 |
| 3 |
MA-DS25-004 |
Neobvezno |
Namestitev na koncu gredi |
Podložka DIN125-A3.2 | 1 |
| 4 | Vijak DIN 7984 M3x5 | 1 |
Kritične dimenzije označene z
OPOZORILO
Ne uporabljajte Loctite ali drugih lepil, ki vsebujejo cianoakrilat. Priporočamo uporabo 3M lepila – Scotch-WeldTM Epoxy Adhesive EC-2216 B/A.
Globina, jašek – končna namestitev (korak)

Če ni določeno drugače
- Dimenzije so v: mm Površinska obdelava: N6
Linearne tolerance
- 0.5-4.9: ±0.05 mm 5-30: ±0.1 mm
- 31-120: ±0.15 mm 121-400: ±0.2 mm
Brez dela/opisa/KOL
| 1 | DS-25 | Vključeno | kodirnik DS-25 | 1 | |
| 2 | EAPK005 | Neobvezno | Komplet | 3 x M2 kodirnik klamps | 1 |
| 3 |
MA-DS25-004 |
Neobvezno |
Namestitev na koncu gredi |
Podložka DIN125-A3.2 | 1 |
| 4 | Vijak DIN 7984 M3x5 | 1 |
Kritične dimenzije označene z "*"
OPOZORILO
Ne uporabljajte Loctite ali drugih lepil, ki vsebujejo cianoakrilat. Priporočamo uporabo 3M lepila – Scotch-WeldTM Epoxy Adhesive EC-2216 B/A.
Avtorske pravice © 2021 Netzer Precision Position Sensors ACS Ltd. Vse pravice pridržane.
Dokumenti / Viri
 |
Netzer DS-25 17-bitni kodirnik absolutne ločljivosti [pdfUporabniški priročnik DS-25 17-bitni kodirnik absolutne ločljivosti, DS-25, 17-bitni kodirnik absolutne ločljivosti, kodirnik absolutne ločljivosti, kodirnik absolutne vrednosti, kodirnik |



